The electrical control system is mainly composed of Siemens PLC programmable controller, and the pressure sensor and displacement sensor of each cylinder send the load and displacement signals to the programmable controller. According to the operation instructions sent by the console, the inverter unit is driven, and the output pressure oil makes the corresponding cylinder move. The programmable controller continuously corrects the motion error according to the detected pressure and displacement signals to keep the load of each cylinder synchronized and balanced.
Complete electrical control system (with later equipment expansion)
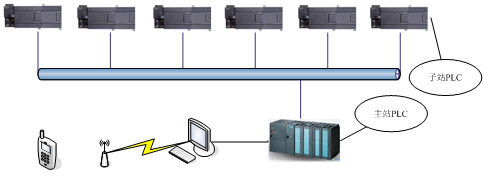
The control system is mainly composed of a master console, a sub-control box, a communication network, and a sensing system. Its functions are as follows:
① Main control system functions
● Read all the pressure values, displacement values and other status values of each substation, and connect the display through the data cable to display the working status of each point in real time;
● Send the master control command to each sub-station to realize the overall control of the system;
● Calculate the data to ensure the synchronization of each control point of the system;
② Sub-control system function
● Read all the pressure values and displacement values of the substation and transmit them to the main console through the bus;
● Read the control instructions sent by the master controller, and issue the command to the execution unit;
③ Profibus communication technology
● PROFIBUS is one of the world's most common fieldbus standards, and has become an important fieldbus standard with its unique technical characteristics, strict certification specifications, open standards, support from many vendors and continuous development of application regulations.
Electronic control system of the equipment
④ Sensor system - displacement sensor
● The system sensor consists of a jacking direction displacement sensor, a jacking direction pressure sensor, a jacking direction displacement sensor, and a push-out direction pressure sensor. The control system is provided with a sub-controller under each jacked object, which is connected with the main controller through the network bus, and the main controller realizes the centralized control of the whole system, including: the control of jacking and jacking device, the collection of pressure data, displacement data and the alarm of various faults.
















